We strive to share our research and methods with the broader community. Through open source development, we hope we can accelerate real-world impact of our research. Please share any feedback, updates, or applications that you develop using these resources. Enjoy!
Switch Kit
The Switch Kit is a DIY toolkit designed to facilitate digital accessibility using accessible switches, which can be either commercial switches like the AbleNet Big Red Switch or homemade ones from various materials. What sets our switch kit apart is its compatibility with a wide range of switches, made possible by housing a MakeyMakey board within the input device. MakeyMakey is a commercial circuit board that transforms everyday objects into touch-sensitive inputs. By integrating it into our input device, we’ve made the board easier to use and more durable.
The switch kit connects to your tablet or computer, enabling it to be used with apps or websites. We’ve developed user-friendly games using Scratch, a kid-friendly programming platform, but the switch kit can also work with other games or apps that utilize arrow keys or the space bar for input. Additionally, it’s compatible with switch control, an accessibility feature on iPads, offering unlimited accessibility possibilities.
OpenSim Simulations
OpenSim is an open source software system for biomechanical modeling, simulation and analysis. Its purpose is to provide free and widely accessible tools for conducting biomechanics research and motor control science. We use OpenSim as a tool to evaluate altered musculoskeletal dynamics and neuromuscular control after neurologic injury. Simulation provides a platform to ask “what-if” questions and quantify parameters that cannot be easily evaluated experimentally. If you are new to musculoskeletal modeling and simulation, we highly recommend the introductory tutorials and excellent series of webinars on the OpenSim website.
Cerebral Palsy Simulations
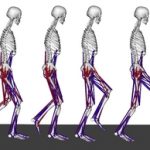 Working with Gillette Children’s Specialty Healthcare, we have developed a series of simulations of children with cerebral palsy. These simulations have been used to evaluate muscle contributions to pathologic gait, impacts of muscle weakness, changes in knee contact forces, and potential benefits of ankle foot orthoses. The simulations include:
Working with Gillette Children’s Specialty Healthcare, we have developed a series of simulations of children with cerebral palsy. These simulations have been used to evaluate muscle contributions to pathologic gait, impacts of muscle weakness, changes in knee contact forces, and potential benefits of ankle foot orthoses. The simulations include:
- Mild Crouch Gait Simulations: Simulations of 10 children with mild crouch gait. For each child, the set-up files, model files, and results are provided for one trial of left and right single-limb stance.
- Crouch Severity Simulations: Simulations of mild, moderate, and severe crouch gait for three children in each group. For each child, the set-up files, model files, and results are provided for one gait cycle.
- Ankle Foot Orthosis Simulations: Simulated effects of walking with and without different ankle foot orthosis designs in children with crouch gait and typically-developing children. The datasets and files provided includ simulations of unassisted walking and walking with powered and passive AFOs.
Synergy Optimization
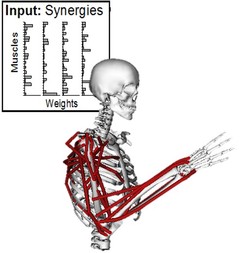 The Synergy Optimization plug-in was developed to enable synergy-based control in OpenSim. It extends Static Optimization to let users specify a matrix of synergies to constrain and couple muscle activations. Beyond synergies, this plug-in can also be used to (1) provide varying weights to different actuators in static optimization or (2) require specific actuators to be activated together. This plug-in was initially developed to evaluate the accuracy of algorithms used to calculate synergies. Please also see the webinar for more information.
The Synergy Optimization plug-in was developed to enable synergy-based control in OpenSim. It extends Static Optimization to let users specify a matrix of synergies to constrain and couple muscle activations. Beyond synergies, this plug-in can also be used to (1) provide varying weights to different actuators in static optimization or (2) require specific actuators to be activated together. This plug-in was initially developed to evaluate the accuracy of algorithms used to calculate synergies. Please also see the webinar for more information.
Synergy Analysis
Muscle synergies provide a method to quantify the complex patterns of muscle recruitment and coordination we use to move our bodies. Neuroscience has used synergy analyses for decades to evaluate muscle coordination and central pattern generators in animals and humans. Our lab has adopted synergy analysis as a method to quantify changes in neuromuscular control after neurologic injury during dynamic tasks. If you want to learn more about synergy analysis, we highly recommend Lena Ting’s introductory tutorial and Matlab examples.
Web Synergy Calculator
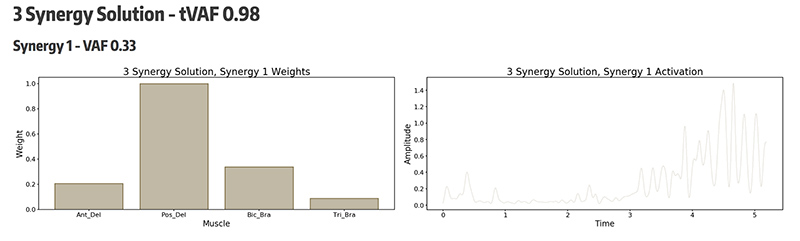 Synergies are calculated using matrix factorization algorithms, such as nonnegative matrix factorization. While these algorithms are available and relatively straight-forward to implement in software platforms such as Matlab & Python, we realize that many of our clinical collaborators do not have easy access to this software or programming experience. To help address this need, Claire Mitchell an undergraduate researcher in our lab, created a tool to calculate synergies from raw electromyography data. This web-based tools allows users to upload data from their lab or clinic, calculate synergies, view the results, and download the results for further analysis.
Synergies are calculated using matrix factorization algorithms, such as nonnegative matrix factorization. While these algorithms are available and relatively straight-forward to implement in software platforms such as Matlab & Python, we realize that many of our clinical collaborators do not have easy access to this software or programming experience. To help address this need, Claire Mitchell an undergraduate researcher in our lab, created a tool to calculate synergies from raw electromyography data. This web-based tools allows users to upload data from their lab or clinic, calculate synergies, view the results, and download the results for further analysis.
Electromyography Data
Electromyography (EMG) recordings provide a window into how we use our muscles to move. We use EMG data routinely in our lab to quantify control, evaluate musculoskeletal simulations, and provide feedback for ubiquitous rehabilitation.
Clinical Test Database
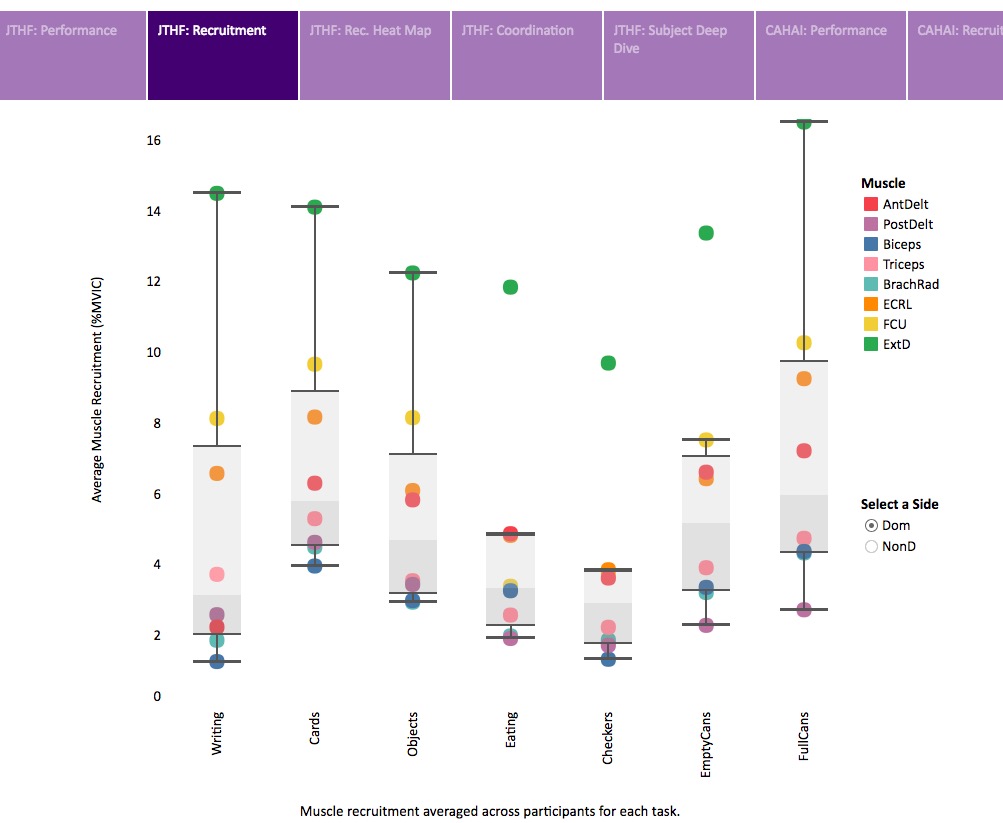
Tests such as the Jebsen Taylor Hand Function Test and the Chedoke Arm and Hand Assessment Inventory are commonly used in the clinic to evaluate hand function after neurologic injury. These tests include a variety of tasks of daily living that help clinicians evaluate function and guide treatment. To help understand how unimpaired individuals recruit and coordinate their muscles to execute these tasks, Keshia Peters evaluated EMG recordings for 20 individuals during these tasks. The Tableau interactive graphic lets you dive into the data and see how we use the complexities of the ultimate machine to perform everyday tasks. Please see our journal article for full details on this study.
EMG-IMU Data Collection & Analysis Toolkit (Unity + Delsys)
The EMG/IMU Collection and Analysis Toolkit is a Unity-based application designed for seamless integration with Delsys Trigno wireless sensors. It supports real-time acquisition, visualization, and export of both EMG and IMU data, making it ideal for rapid testing, prototyping, and human-subject research.
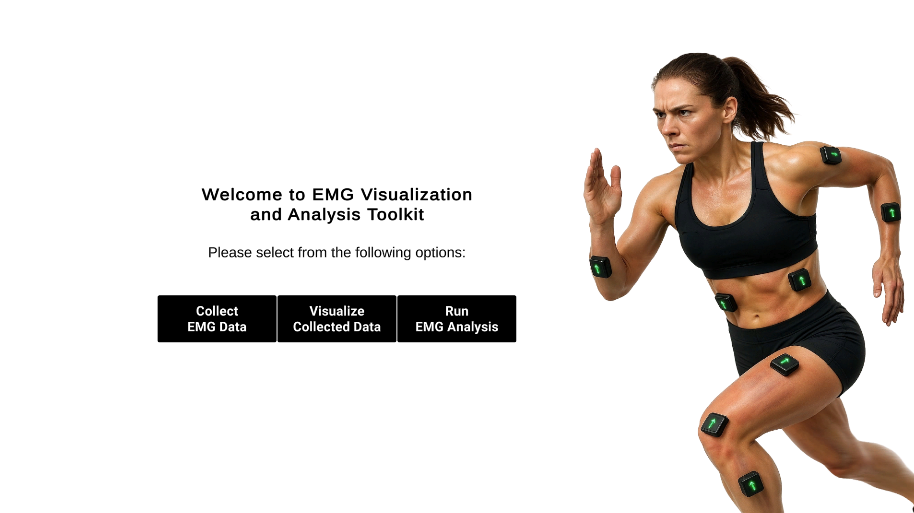 The toolkit includes three main modules:
The toolkit includes three main modules:
- Data Collection Page: This is the central interface for setting up and running data collection sessions. Users can select label sensors, define trial names, see live EMG data and scale it accordingly. All recorded data is saved into two txt files (EMG and IMU).
- Data Visualization Page: This page allows users to replay the EMG data after it was recorded.
- Data Analysis Page: After data is collected, this page offers an interface to load and explore recorded sessions. Users can choose from the following analysis options:
- Plot filtered, normalized EMG
- Plot histogram of filtered signals
- View average or maximum EMG values per channel
Orthosis Design
Orthoses or exoskeletons are assistive devices that can be used to improve human performance. Advances in fabrication methods, such as 3D-printing and scanning, have increased our ability to customize these devices to individual users. Providing open source designs for orthoses can accelerate design and innovation.
Wrist-Driven Orthosis

Wrist-driven orthoses have been used for decades by people with cervical spinal cord injuries. These simple mechanical devices allow a person to flex and extend their wrist to open and close their hand. However, fabrication of these devices has been challenging and required extensive time to customize the device for each individual. Alexandra Portnova, an undergraduate researcher in our lab, led the development and testing of an open source 3D-printed WDO. We tested the device with three individuals with spinal cord injury and made the design, including a detailed instruction manual, available for others to use and build upon. Link to 3D-Printed Wrist-Driven Orthosis (WDO)
Ankle-Foot Orthosis
 Hwan Choi designed a 3D-printed adjustable-stiffness that can be tuned with different sizes of elastic polymer bands. This AFO was used for evaluating how different dorsiflexion resistance impacts musculotendon function and walking pattern using ultrasound, musculoskeletal modeling (OpenSim) and a motion capture system.
Hwan Choi designed a 3D-printed adjustable-stiffness that can be tuned with different sizes of elastic polymer bands. This AFO was used for evaluating how different dorsiflexion resistance impacts musculotendon function and walking pattern using ultrasound, musculoskeletal modeling (OpenSim) and a motion capture system.
Wearable Sensing
Wearable sensing of human movement is a rapidly expanding field. Our team uses a wide range of technology to monitor movement and function in the lab, clinic, and home. We share access to the algorithms and methods we develop to help accelerate clinical translation and future use.
HuskySTEPS: Mobile app to monitor shank-vertical-angle
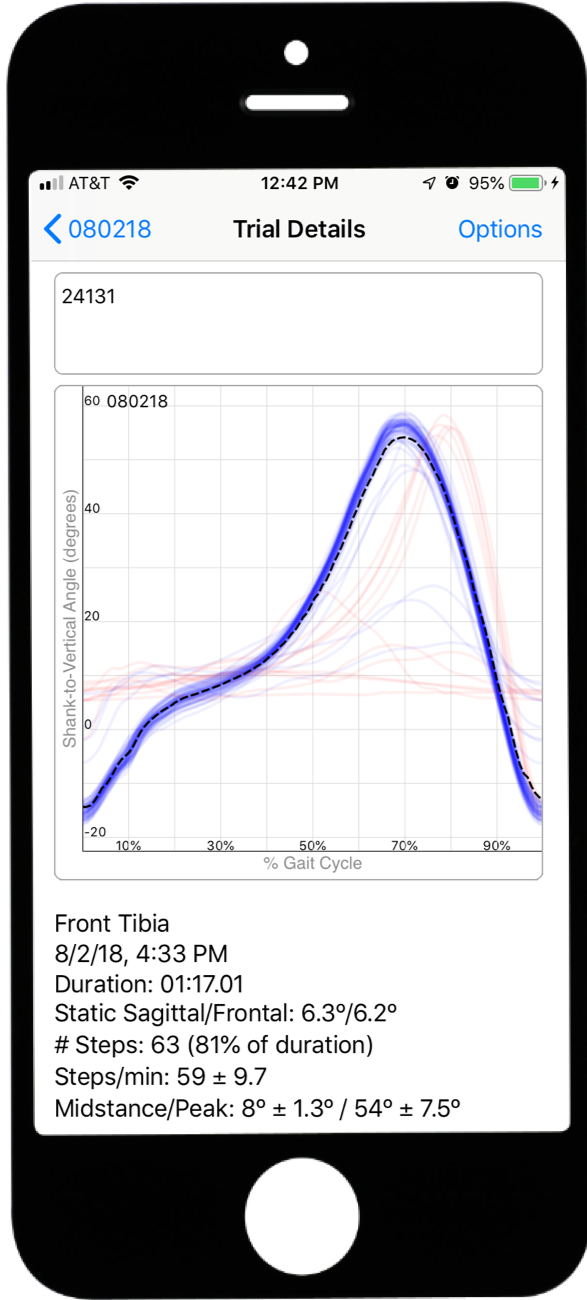 Shank-to-vertical angle (SVA) is used by orthotists and therapists to improve walking function. We developed and tested a mobile app that lets users monitor (SVA) during standing or walking using an Android or iOS smartphone. Using a running armband or other strap, you attach your phone to the shank and the app automatically calculates SVA over the gait cycle. Raw data or summary plots can be exported from the app to your e-mail or other services. Please see our publication for full details and to download the app.
Shank-to-vertical angle (SVA) is used by orthotists and therapists to improve walking function. We developed and tested a mobile app that lets users monitor (SVA) during standing or walking using an Android or iOS smartphone. Using a running armband or other strap, you attach your phone to the shank and the app automatically calculates SVA over the gait cycle. Raw data or summary plots can be exported from the app to your e-mail or other services. Please see our publication for full details and to download the app.
Jerk Ratio: Open-source evaluation of hand use from accelerometers
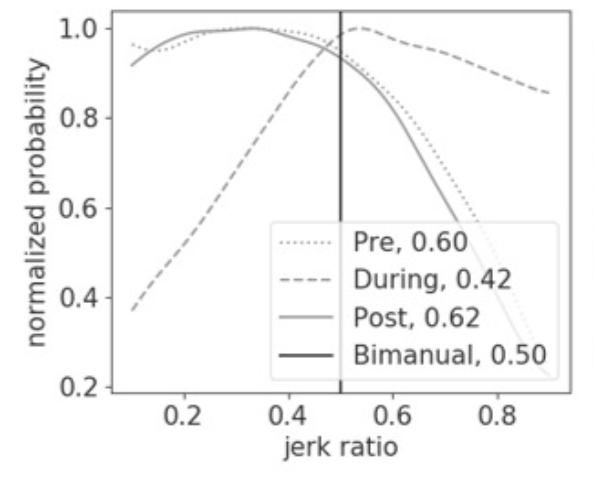 Accelerometers have become common for evaluating and guiding rehabilitation. In particular, devices like the Actigraph are worn on the wrists to monitor arm use among individuals with cerebral palsy or stroke. While this technology provides quantitative measures of function in daily life, they rely on proprietary algorithms that do not let users compare results across devices or even different versions of devices from the same manufacturer. We developed Jerk Ratio to complement these metrics and provide a common measure that researchers and clinicians can use to evaluate arm use with any wrist-worn accelerometers. We evaluated these methods for children with cerebral palsy before, during, and after constraint induced movement therapy. Open-source code, as well as a Jupyter notebook to upload data and plot results are provided to support clinical translation.
Accelerometers have become common for evaluating and guiding rehabilitation. In particular, devices like the Actigraph are worn on the wrists to monitor arm use among individuals with cerebral palsy or stroke. While this technology provides quantitative measures of function in daily life, they rely on proprietary algorithms that do not let users compare results across devices or even different versions of devices from the same manufacturer. We developed Jerk Ratio to complement these metrics and provide a common measure that researchers and clinicians can use to evaluate arm use with any wrist-worn accelerometers. We evaluated these methods for children with cerebral palsy before, during, and after constraint induced movement therapy. Open-source code, as well as a Jupyter notebook to upload data and plot results are provided to support clinical translation.
SHRED: Open-source reconstruction of running motion from sparse IMU data
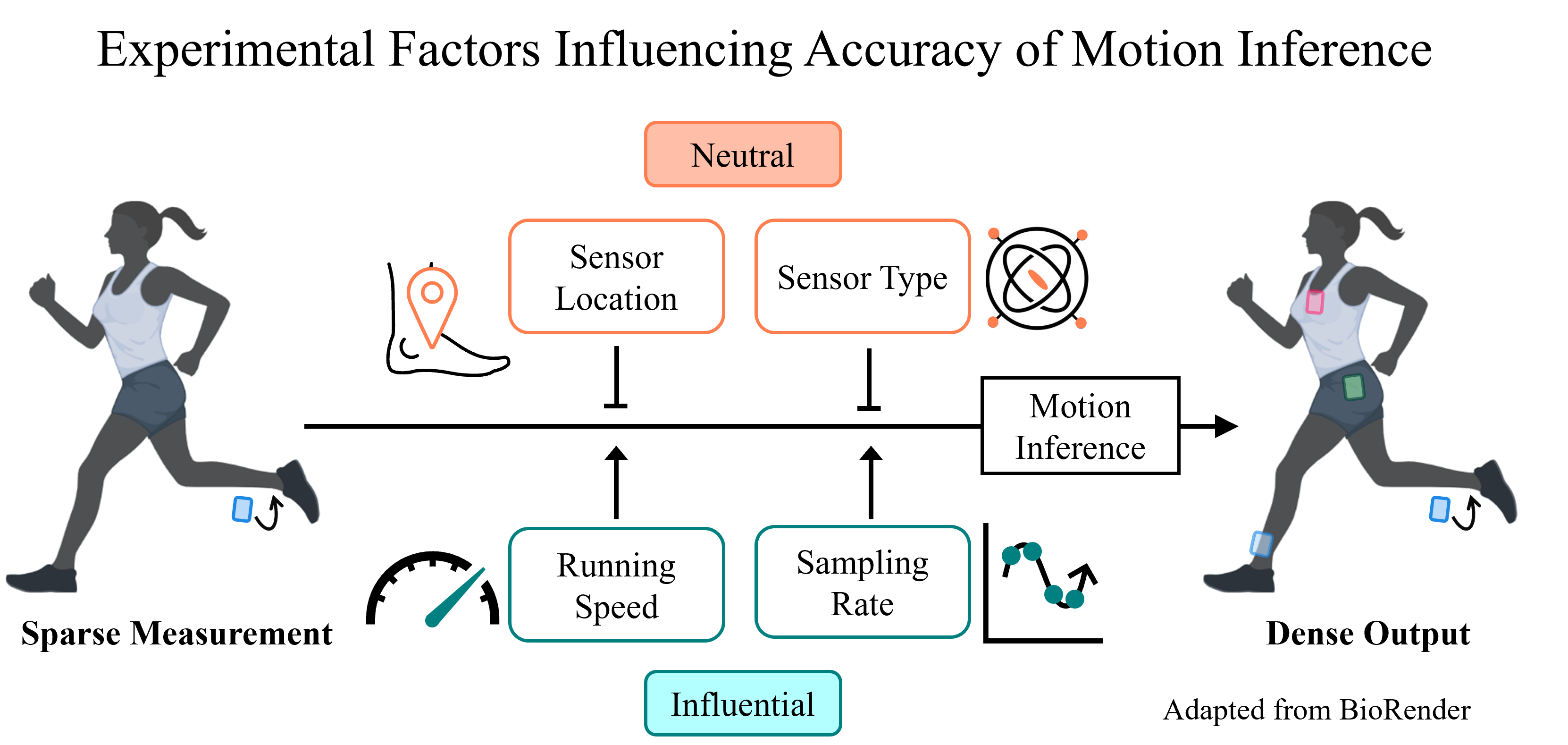 Inertial measurement units (IMUs) are widely used to analyze running performance, but using only one sensor can limit the number of digital biomarkers available. We developed and tested shallow recurrent decoder networks (SHRED) to reconstruct dense IMU signals from a single input sensor. SHRED models were trained on treadmill running data and evaluated across different sensor locations, types, sampling rates, and running speeds. This approach may broaden access to motion analysis with fewer sensors. Data and open-source code from this study. The repository includes data and an instructional Jupyter notebook for training and testing individualized SHRED models.
Inertial measurement units (IMUs) are widely used to analyze running performance, but using only one sensor can limit the number of digital biomarkers available. We developed and tested shallow recurrent decoder networks (SHRED) to reconstruct dense IMU signals from a single input sensor. SHRED models were trained on treadmill running data and evaluated across different sensor locations, types, sampling rates, and running speeds. This approach may broaden access to motion analysis with fewer sensors. Data and open-source code from this study. The repository includes data and an instructional Jupyter notebook for training and testing individualized SHRED models.