Journal Article in The Royal Society:
This work highlights the potential of data-driven models grounded in dynamical systems theory to predict complex individualized responses to ankle exoskeletons., without requiring explicit knowledge of the individual’s physiology or motor control
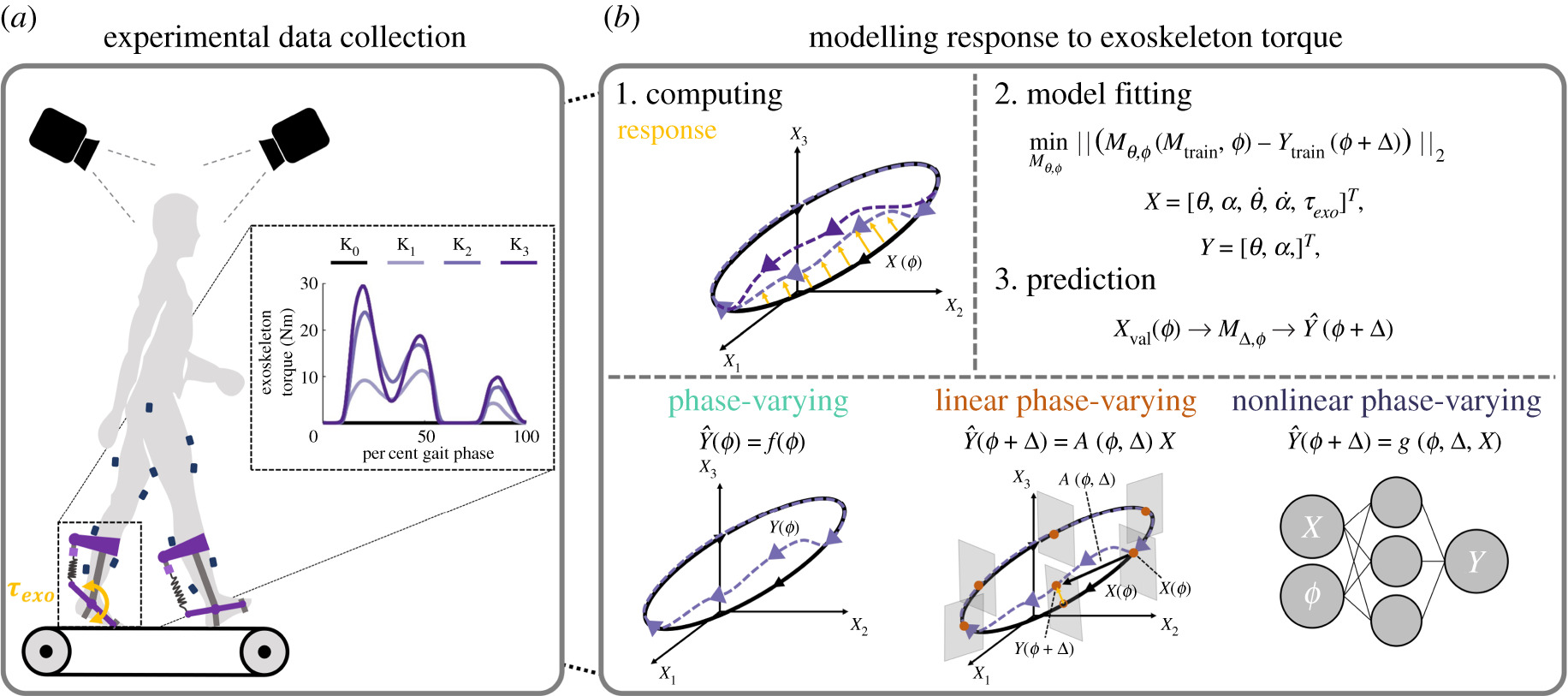
Aim: Evaluate the ability of three classes of subject-specific phase-varying (PV) models to predict kinematic and myoelectric responses to ankle exoskeletons during walking, without requiring prior knowledge of specific user characteristics.
Method: Data from 12 unimpaired adults walking with bilateral passive ankle exoskeletons were captured. PV, linear PV (LPV), and nonlinear PV (NPV) models leveraged Floquet theory to kinematics and muscle activity in response to three exoskeleton torque conditions.
Results: The LPV model’s predictions were more accurate than the PV model when predicting less than 12.5% of a stride in the future and explained 49–70% of the variance in hip, knee and ankle kinematic responses to torque. The LPV model also predicted kinematic responses with similar accuracy to the more-complex NPV model. Myoelectric responses were challenging to predict with all models, explaining at most 10% of the variance in responses.
Interpretation: This work highlights the potential of data-driven PV models to predict complex subject-specific responses to ankle exoskeletons and inform device design and control.