The University of Washington College of Engineering continued its long‑standing tradition of Engineering Discovery Days in 2026, bringing hands‑on STEM experiences to K–12 students, teachers, and families from across the state.
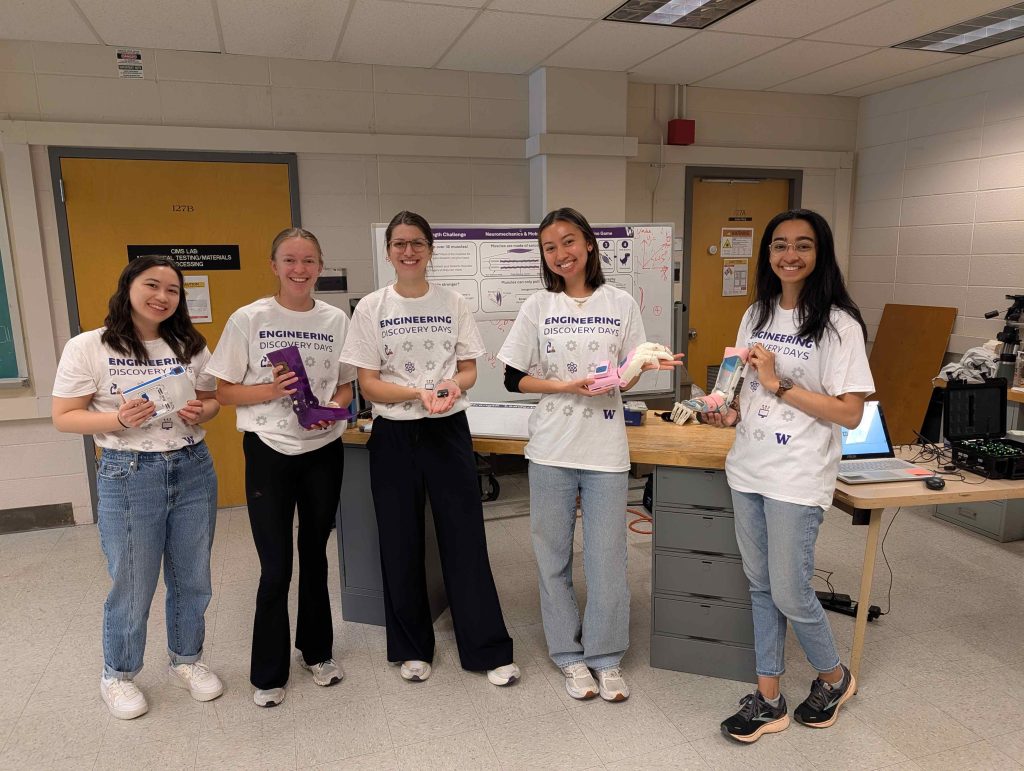
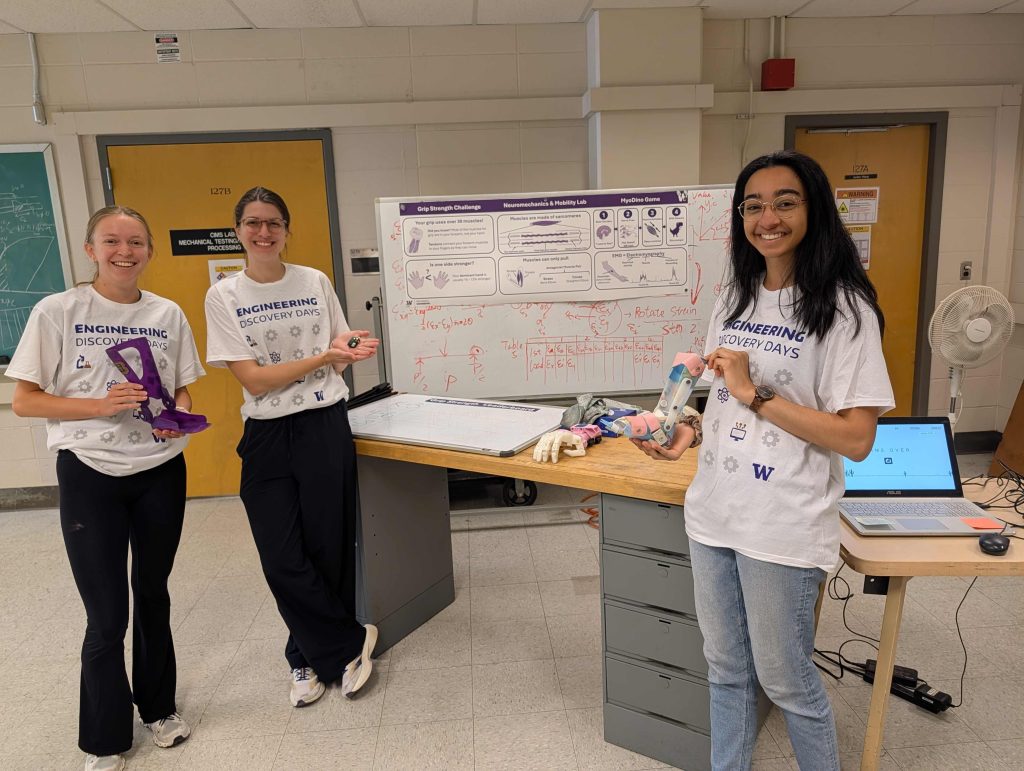
The UW Biomechanics community participated with the exhibit “Biomechanics Assemble! From Exoskeletons to Cytoskeletons,” showcasing how we study movement and forces across scales.
Visitors explored interactive demos including MyoDino, where muscle activity controlled a computer game using wireless EMG sensors, and a Grip Strength Challenge using a digital dynamometer to test and compare strength. Participants also engaged with 3D‑printed ankle–foot orthoses (AFOs) and hand models, learning how biomechanics and design support mobility and function.
It was a fun and impactful opportunity to spark curiosity, share our research, and inspire the next generation of engineers.