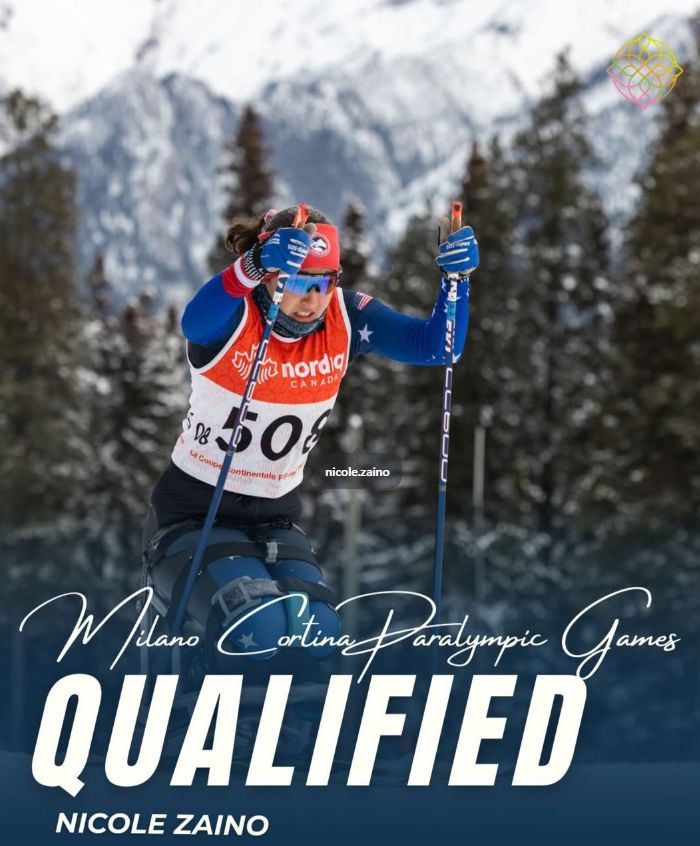
We were proud to celebrate Nicole Zaino (PhD ’23), who competed in Para Nordic skiing—including cross‑country and biathlon—at the 2026 Winter Paralympics in Italy.
Nicole discovered adaptive sports during her PhD in Mechanical Engineering at UW, first through Seattle sled hockey in 2019 and later sit‑skiing in 2022, where she quickly found her passion. After graduating, she balanced her engineering background with elite training, rising to compete internationally and represent Team USA on the Paralympic stage.
Nicole’s journey from biomechanics researcher to Paralympian was deeply inspiring to the Neuromechanics & Mobility community. [read more at washington.edu]
Congratulations, Nicole! We proudly cheered you on from Seattle and beyond.