Congratulations to the Neuromechanics & Mobility Lab undergraduates who presented their research at the University of Washington’s 29th Annual Undergraduate Research Symposium on May 15! From oral presentations to posters, our students shared work spanning early mobility, gait analysis, and neuromodulation — proud moment for the whole lab.
Oral Presentations
Early Intervention Providers’ Perspectives on a Switch-Accessible Play Kit Analyzed Through an Interdependence Framework Alisha Bose (mentored by Mia Hoffman)
Muscular Coactivation Analysis in Toddlers with Hypotonia Spencer Hensley (mentored by Mia Hoffman)
Poster Presentations
Real-Time Bayesian Estimation of Steady-State Oxygen Consumption During Clinical Walking Trials for Neuromuscular-Impaired Individuals David Green (mentored by Mackenzie Pitts)
Object Detection Optimization for Movement Tracking of Young Children Using Mobility Aids Katie Leija (mentored by Mia Hoffman)
Effects of Bodyweight Support on the Gait Deviation Index of Children with Cerebral Palsy Alyssa Miller (mentored by Ally Clarke)
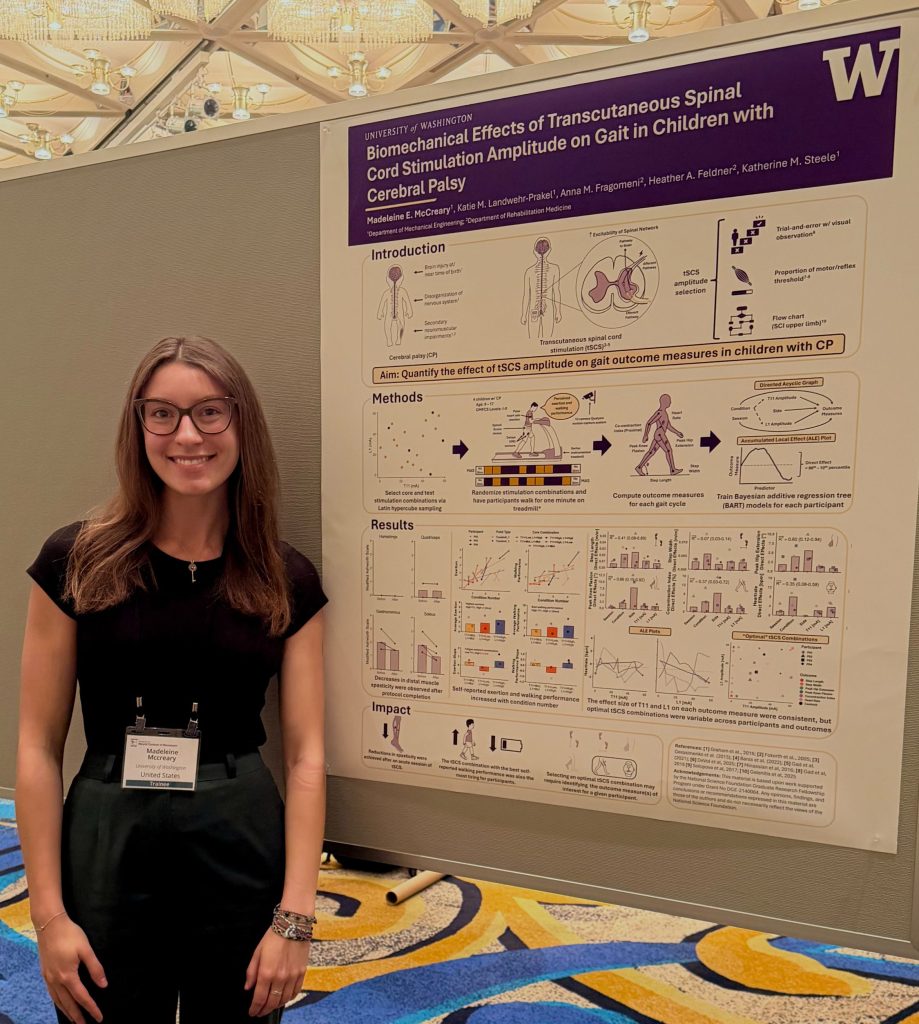
Evaluating the Effects of Transcutaneous Spinal Cord Stimulation on Perceived Walking Performance and Exertion in Children with Cerebral Palsy Quinn Mundell (mentored by Madeleine McCreary)
Huge thanks to the graduate student mentors who supported these projects, and congratulations to all our presenters on a fantastic symposium!