Journal Article in PLoS ONE
Computers and technology are essential tools for supporting the development of toddlers with and without disabilities. Developmentally appropriate access to technology can support toddlers in learning and play. While touch screens are a popular interaction modality for children under the age of three, they may not be appropriate for all children or all tasks.
 Aim: We know comparatively little about how toddlers interact with joystick-based technology, and more fundamental research is required to understand joystick interactions at different ages and developmental stages.
Aim: We know comparatively little about how toddlers interact with joystick-based technology, and more fundamental research is required to understand joystick interactions at different ages and developmental stages.
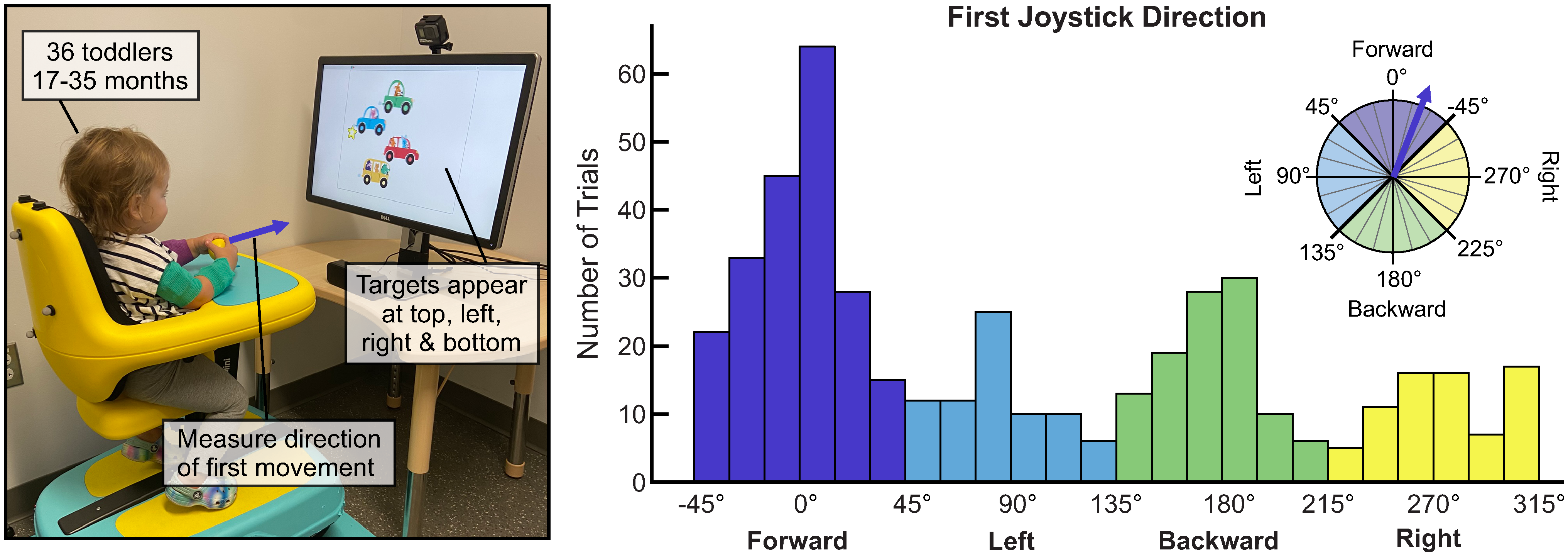
Methods: We quantified how 36 nondisabled toddlers used a joystick to play a cause-and-effect game on a computer.
Results: Children demonstrated a strong preference for moving the joystick forward first, regardless of the target direction. On average, the oldest children navigated the joystick to the target 5 seconds faster than the youngest children, and were nearly twice as efficient in their joystick path.
Interpretation: These findings inform the design of assistive algorithms for joystick-enabled computer play and developmentally appropriate technologies for toddlers.