A UW Mechanical Engineering capstone team‘s project has been awarded a grant to continue the development of a pediatric exoskeleton. The team collaborated with physical therapists at Seattle Children’s Hospital to develop their prototype and entered into the 2016 Target Challenge grant competition.
New England Pediatric Device Consortium (NEPDC) and the Center for Translation of Rehabilitation Engineering Advances and Technology (TREAT) Award $150K between four Medical Device Innovator teams.
We are pleased to announce Jessica Zistasis, a member of the capstone team, will join our lab to pursue this project and further its development for her MS.
 Our director of the Human Ability and Engineering Lab, Kat Steele, is highlighted in the Puget Sound Business Journal. Below a blurb from the article can be read, but to read in full, follow this
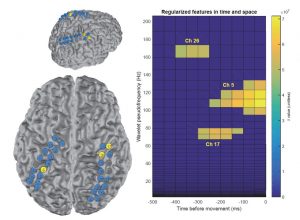
Our director of the Human Ability and Engineering Lab, Kat Steele, is highlighted in the Puget Sound Business Journal. Below a blurb from the article can be read, but to read in full, follow this  “Multistep model for predicting upper-limb 3D isometric force application from pre-movement electrocorticographic features.” IEEE Engineering Medicine & Biology")
 Great job to lab members Ben Shuman, Michael Rosenberg, Sasha Portnova, and Hwan Choi for presenting their work at this year’s American Society of Biomechanics this August. To view the program and read more about biomechanics research,
Great job to lab members Ben Shuman, Michael Rosenberg, Sasha Portnova, and Hwan Choi for presenting their work at this year’s American Society of Biomechanics this August. To view the program and read more about biomechanics research,